
- 15 ม.ค. 2560 16:41:22
- ไฟฟ้าอิเล็คทรอนิกส์
เซอร์โวมอเตอร์ (Servo Motor)
เซอร์โวมอเตอร์ (Servo Motor) เป็นมอเตอร์ที่มีการควบคุมการเคลื่อนที่ของมัน (State) ไม่ว่าจะเป็นระยะ ความเร็ว มุมการหมุน โดยใช้การควบคุมแบบป้อนกลับ (Feedback control) เป็นอุปกรณ์ที่สามารถควบคุมเครื่องจักรกล หรือระบบการทํางานนั้นๆ ให้เป็นไปตามความต้องการ เช่น ควบคุมความเร็ว (Speed), ควบคุมแรงบิด (Torque), ควบคุมแรงตําแหน่ง (Position), ระยะทางในการเคลื่อนที่(หมุน) (Position Control) ของตัวมอเตอร์ได้ ซึ่งมอเตอร์ทั่วไปไม่สามารถควบคุมในลักษณะงานเบื้องต้นได้ โดยให้ผลลัพธ์ตามความต้องการที่มีความแม่นยําสูง
ขนาดของ Servo Motor จะมีหน่วยในการบอกขนาดเป็นวัตต์ (Watt) Servo Motor ของPanasonic จะมีขนาดตั้งแต่ 50W-15kWทําให้ผู้ใช้งานมีความหลากหลายในการใช้งาน

โดยทั่วจะมีทั้งดีซีและเอซีเซอร์โว ในเครื่องจักรรุ่นเก่าๆเราจะพบว่า DC Servo Motor มีการใช้เครื่องจักรกลอุตสาหกรรมมากกว่า AC Servo Motor เนื่องจากช่วงที่ผ่านมาการควบคุมกระแสกระแสสูงๆนั้นจะต้องใช้ SCRs แต่ปัจจุบันทรานซิสเตอร์ได้พัฒนาขีดความสามารถให้ตัดต่อกระแสสูงและใช้งานที่ความถี่ได้สูงๆขึ้น จึงทำให้ระบบควบคุมทางเอซีและระบบเซอร์โวได้ถูกนำมาใช้งานมากขึ้น ซึ่งสามารถแยกประเภทของเซอร์โวได้ดังนี้
1. มอเตอร์ชนิดที่มีแปรงถ่าน
เซอร์โวมอเตอร์ชนิดนี้ที่สเตเตอร์จะเป็นแม่เหล็กถาวร ส่วนโรเตอร์ยังใช้แปรงถ่านและคอมมิวเตอร์เรียงกระแสเข้าสู่ขดลวดอาร์เมเจอร์ เหมือนกับดีซีมอเตอร์ทั่วไป
2. เซอร์โวมอเตอร์ชนิดที่ไม่มีแปรงถ่าน
เซอร์โวมอเตอร์ในกลุ่มนี้ประกอบด้วยดีซีเซอร์โว (DC Brushless Servo ่โรเตอร์ทำด้วยแม่เหล็กถาวร) เอซีเซอร์โว (AC Servo) ซึ่งมีทั้งแบบซิงโครนัสเซอร์โว อะซิงโครนัสเซอร์โว (การนำอินดัคชั่นมอเตอร์มาใช้ทำเป็นระบบขับเคลื่อนเซอร์โวมอเตอร์) และ สเตปปิ้งเซอร์โวมอเตอร์
ข้อจำกัดอย่างหนึ่งของระบบควบคุมเซอร์โว ก็คือการใช้งานจะต้องเป็นแบบ Closed loop เท่านั้น การใช้งานระบบควบคุมเซอร์โวไม่สามารถเลือกควบคุมเป็นแบบ Open loop ได้เหมือนกันระบบขับเคลื่อนเอซี (AC Drives) การตอบสนองของระบบเซอร์โว เช่น อัตราเร่ง แรงบิด และตำแหน่งที่ควบคุม จะไม่เป็นไปตามวัตถุประสงค์หากไม่มีสัญญาณป้อนกลับไปยังชุดขับเคลื่อนเซอร์โว
การควบคุมการทำงานในระบบนี้อุปกรณ์ป้อนกลับหรือเอ็นโค๊ดเตอร์ (Encoder) จะมีบทบาทความสำคัญอย่างยิ่งเสมือนกับเป็นของคู่กันชนิดที่เรียกว่าขาดซึ่งกันและกันไม่ได้ ในทางปฎิบัติจึงทำเซอร์โวมอเตอร์และเอ็นโค๊ดเตอร์ ถูกออกแบบและผลิตสร้างขึ้นมาคู่กันในลักษณะเป็นแพ็คเกจ (Package ซึ่งมี Encoder ติดอยู่ที่ส่วนท้ายของมอเตอร์ ดังรูป
Gearheads = เกียร์สำหรับลดความเร็วรอบเพื่อเพิ่มแรงบิด
Shafts = เพลาของมอเตอร์
Flanges = หน้าแปลนสำหรับติดตั้งมอเตอร์
Feed back = อุปกร์ป้อนกลับหรือ encoder
Connectorization = ขั้วต่อสายไฟเข้ามอเตอร์ และขั้วต่อสายสำหรับ Encoder
Breakes = ชุดเบรก
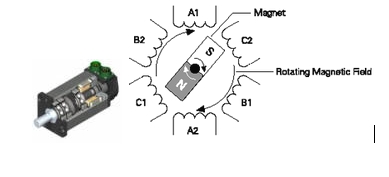
โครงสร้างของ AC servo Motor จะคล้ายกับมอเตอร์ 3 เฟสทั่ว ๆ ไป ซึ่งจะประกอบด้วย 2ส่วนที่สำคัญ คือ สเตเตอร์และโรเตอร์ โดยสเตเตอร์จะประกอบด้วยขดลวด 3 ชุด ขดลวดภายในจะต่อเป็นแบบสตาร์ (Star หรือ WYE) และมีสายต่อมาที่ขั้วต่อสายด้านนอก 3 เส้น (จุดนิวทรอลจะอยู่ด้านใน) ส่วนโรเตอร์ทำด้วยแม่เหล็กถาวร (Permanent Magnet) ไม่มีขดลวดพัน,ไม่มีคอมมิวเตเตอร์ และไม่มีแปรงถ่าน (Brushless)
โครงสร้างที่ไม่มีขดลวดพันไม่และแปรงถ่าน จะทำให้ประสิทธิภาพของมอเตอร์สูงขึ้น ไม่มีการสูญเสืยในขดลวดทองแดง ไม่ต้องบำรุงรักษาเนื่องจากแปรงถ่าน ไม่เกิดประกายไฟเนื่องจากการเรียงกระแสจากแปรงถ่านผ่านคอมมิวเตอร์ไปยังขดลวดทองแดงที่พันอยู่ในตัวโรเตอร์
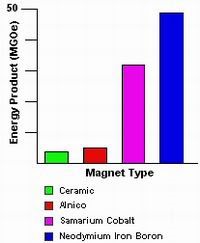
สำหรับวัสดุที่นำมาสร้างแม่เหล็กถาวรนี้จะแตกต่างกันไป โดยขึ้นอยู่กับราคาและเทคโนโลยีของบริษัทผู้ผลิดนั้นๆ ซึ่งมีตั้งแต่ชนิดทีราคาถูกเช่น เซรามิก (เฟอไรต์) จนถึงการใช้วัสดุที่มีราคาแพงอย่างเช่น ซามาเรียม โคบอลต์ หรือ นีโอไดเมียม เป็นต้น (ปัจจุบันเอซีเซอร์โวมอเตอร์ส่วนใหญ่จะใช้วัสดุสารแม่เหล็กแบบ นีโอไดเมียม เนื่องจากมีคุณสมบัติความเป็นแม่เหล็ก และความเหมาะสมเรื่องราคาดีกว่า เมื่อเปรียบเทียบกับวัสดุสารแม่เหล็กแบบอื่นๆ
การทำงานของเซอร์โวมอเตอร์ชนิดนี้จะคล้ายกับการทำงานของซิงโครนัสมอเตอร์ 3 เฟส กล่าวคือเมื่อมีการควบคุมให้คอนโทรลเลอร์จ่ายกระแสไฟฟ้าเข้าไปยังขดลวดที่สเตเตอร์ แกนเหล็กของสเตเตอร์จะกลายเป็นแม่เหล็กไฟฟ้า และหมุนเคลื่อนที่ด้วยความเร็วที่แปรผันตามความถี่ ซึ่งเรียกว่า ความเร็วซิงโครนัส (synchronous speed) หรือความเร็วสนามแม่เหล็กหมุน และจะดูดให้โรเตอร์ซึ่งเป็นแม่เหล็กถาวรหมุนเคลื่อนที่ตาม
จากลักษณะโครงสร้างของโรเตอร์และหลักการทำงานที่เหมือนกับซิงโครนัสมอเตอร์ซึ่งเป็นมอเตอร์แบบเอซี แต่ไม่มีแปรงถ่าน (Brushless) ไม่มีซี่คอมมิวเตอรเตอร์ จึงทำให้มอเตอร์ชนิดนี้มีชื่อเรียกขานแตกต่างกันออกไป เช่น เรียกทับศัพท์ว่า Permanent Magnet Synchronous Motor(PMSM) ซึ่งหมายถึงซิงโครนัสมอเตอร์ที่ไม่มีแปรงถ่าน บ้างก็เรียกว่าเอซีเซอร์โวมอเตอร์ (AC Servo motor) หรือบ้างก็เรียกสั้นๆย่อๆว่า AC Brushless หรือ Brushless Motor เป็นต้น
ลักษณะของระบบควบคุมเซอร์โวมอเตอร์จะเป็นระบบควบคุมแบบลูปปิด(Closed loop control) ซึ่งประกอบด้วย 3 โหมดการควบคุมคือ โหมดการควบคุมแรงบิด (Torque Control Mode) ซึ่งอยู่วงรอบหรือลูปในสุด โหมดการควบคุมอัตราเร่ง(Velocity Control Mode) และโหมดการควบคุมตำแหน่ง(Position Control Mode) ซึ่งอยู่ลูปด้านนอกสุด โดยมีองค์ประกอบที่สำคัญๆดังรูป
1. เซอร์โวมอเตอร์ (Servo Motor) (ตำแหน่ง 4.2)
2. ชุดควบคุมการขับเคลื่อนเซอร์โว (Servo Drive,Servo Amplifier หรือบ้างก็เรียกว่า servo controller ) (ตำแหน่ง 4.4, 4.5, 4.6)
3. อุปกรณ์ป้อนกลับ (Feedback Device เช่น Speed encoder และ Position Sensor ) (ตำแหน่ง 4.3)
การทํางานเพียงตัว Servo Motor เพียงอย่างเดียวนั้นไม่สามารถทํางานได้ การที่จะให้ Servo Motor จะควบคุมลักษณะที่กล่าวมาข้างต้นนั้นต้องมีองค์ประกอบดังนี้
1.คอนโทรลเลอร์ (Controller)
หลักการทํางานหลักๆ หน้าที่ของ Controller คือ มีหน้าที่รับคําสั่งจากผู้ใช้งานว่าต้องการให้ Servo Motor นั้นเคลื่อนที่ด้วยความเร็วเท่าไหร่และระยะทาง ใกล้หรือไกลแค่ไหน หน้าที่ตรงจุดนี้จะเป็น Controller จะเป็นตัวกําหนดให้กับตัว Servo Moter

2. เซอร์โวไดรฟ์เวอร์ (Servo Driver)
หน้าที่ของ Servo Driver คือ จะรับสัญญาณมาจาก Controller และสั่งการให้กับตัว Servo Motor เคลื่อนที่ตามที่ Controller สั่งการมา แต่ทําไม Controller ไม่สั่งการควบคุมไปที่ Servo Motor โดยตรง เนื่องจาก Servo Driver จะเป็นตัวที่ปรับตั้งค่าของตัว Servo Motor ให้ทํางานตามรูปแบบของการควบคุมไม่ว่า จะเป็นการควบคุม ความเร็ว(Speed Control) , แรงบิด(Toucque) และ ตําแหน่ง(Position Control) ตัว Servo Driver จะเป็น ตัวกําหนดค่าตัวแปรหรือพารามิเตอร์ต่างๆ ให้กับตัว Servo Motor ให้ทํางานได้อย่างถูกต้องและแม่นยํา เพราะฉะนั้นเมื่อใช้ Servo Motor ก็จะต้องมี Servo Driver เสมอ

3. เซอร์โวมอเตอร์ (Servo Motor)
หน้าที่ของเซอร์โวมอเตอร์ คือ ขับเคลื่อนอุปกรณ์ของเครื่องจักรกลหรือระบบของการทํางานนั้นๆ ให้เป็นไปตามรูปแบบที่ ได้รับคําสั่งจากตัว Servo Driver พร้อมกับส่งสัญญาณป้อนกลับให้กับตัว Servo Driver ว่าตอนนี้ Servo Motor เคลื่อนที่ด้วย ความเร็วเท่าไหร่และระยะทางในการเคลื่อนที่เป็นระยะทางเท่าไหร่แล้ว ด้วยสัญญาณของตัว Encoder ที่อยู่ภายในตัว Servo Motor ทําให้การเคลื่อนที่ของ Servo Motor นั้นมีความแม่นยําสูง

ด้วยองค์ประกอบข้างต้นทั้งหมดทั้งมวลนั้น พอจะทําให้ผู้ที่จะใช้งานหรือผู้ที่กําลังศึกษา พอที่จะมองภาพของการ ทํางานของระบบ Servo Motor ว่าองค์ประกอบของระบบหรือการที่จะใช้งาน Servo Motor นั้นต้องมีองค์ประกอบอะไรบ้างจึงจะใช้งาน Servo Motor ได้อย่างถูกต้องและมีประสิทธิภาพ

